پهباد کوچک و سوسك رباتیک برای شناسايی مناطق خاص
اخيرا محققان در دانشگاه ايالتي كاروليناي شمالي (NCSU) توانسته اند سوسك هايي با قابليت كنترل از راه دور را طراحي كنند كه با هواپيماهاي كوچك بدون سرنشين كار مي كنند و براي شرايط محيطي سخت و دشوار مانند ساختمان هاي فروريخته شده، استفاده مي شوند.
هميشه لازم نيست براي ساخت يك ربات از ابتداي كار و طراحي آن شروع كرد.مانند روبات هاي بایابات( كه در آنها از حيوانات به جاي ربات استفاده مي شود.) در مورد اين ربات ها دانشمندان توانسته اند از حشرات استفاده كنند و از آنها به عنوان ربات هاي قابل كنترل از راه دور براي جمع آوري اطلاعات از مناطق ناآشنا و ناامن استفاده كنند.محققان در NCSU در حال كار بر روي سخت افزارها و نرم افزارهايي هستند كه اين كار را امكانپذير كنند،آنها در حال تركيب اين ربات ها با هواپيماهاي كوچك بدون سرنشين هستند كه اين هواپيماها وظيفه ي راهنمايي و مسيريابي اين ربات ها در مناطق صعب العبور را دارند.
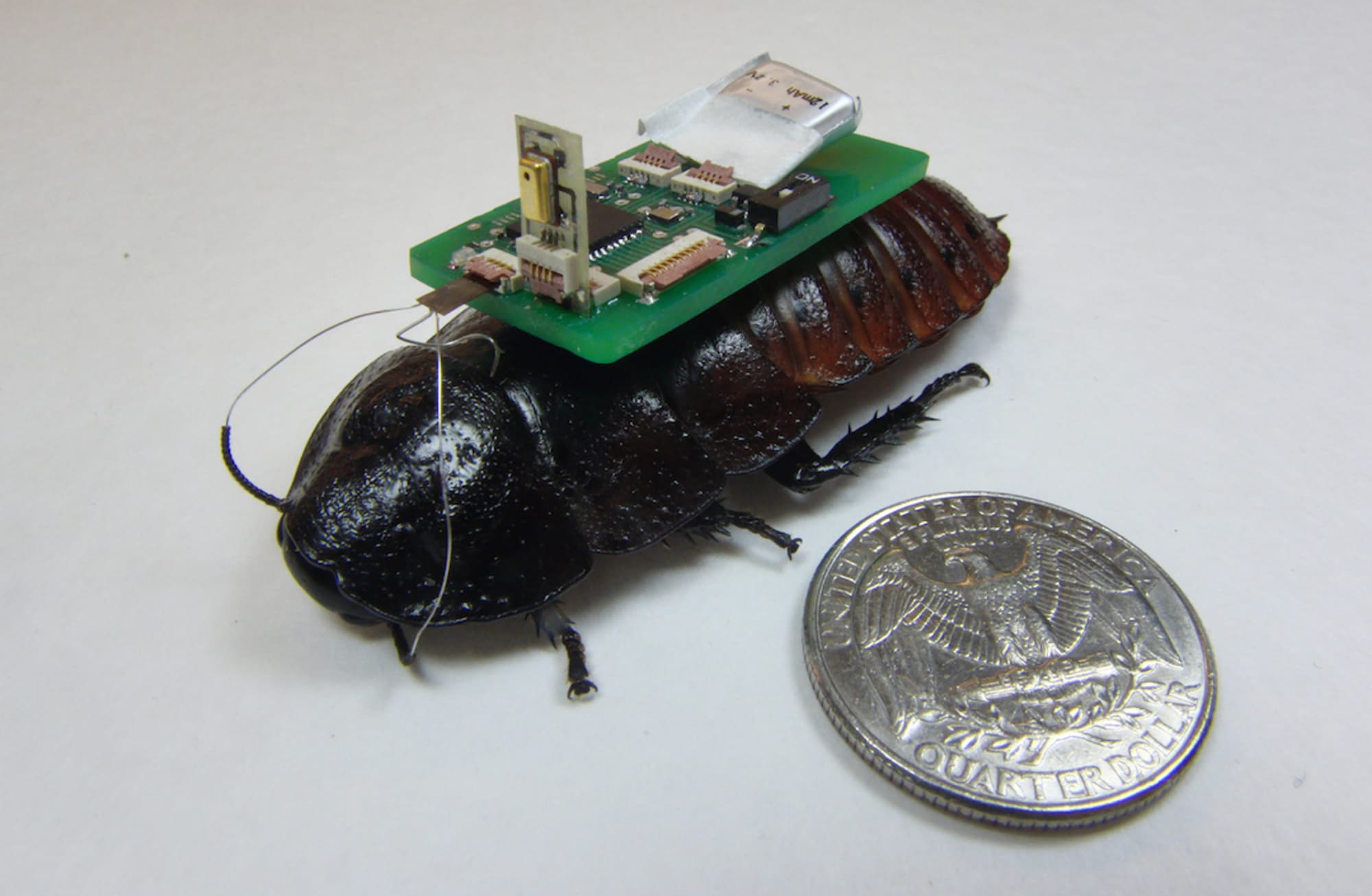
اين biobot ها با متصل كردن قطعات الكتريكي كوچك به يك سوسك ساخته شده است. اين قطعات الكتريكي به شاخك هاي آنها متصل شده است در واقع اين شاخك ها در حالت عادي براي مسير يابي سوسك استفاده مي شود. در بدن سوسك ها در زير شكمشان اندامي وجود دارد كه با توجه به حركت هواي اطراف، آنها را از وجود جانوران ديگر در اطراف سوسك آگاه مي كند و نزديك شدن جانوران را پيش بيني مي كند و آن را هشدار مي دهد.در حالي كه شاخك ها مي توانند اجسامي كه در جلوي سوسك قرار دارند را نيز شناسايي كنند.دانشمدان توانسته اند با قطعات الكتريكي اين اندام را تحريك كنند و سوسك ها را تحت كننرل خود در بياورند.
در مطالعات قبلي پيشنهاد شده بود كه در شرايط خاص مانند فروريختن يك ساختمان از biobot هاي مستقل يا حساس به صدا استفاده شود.سيستم مورد نظر NCSU اين اجازه را مي دهد كه ربات به صورت آزادانه در مناطق كوچك و حساس حركت كند و هواپيما بتواند آن را از بالا مشاهد كند. در اين سيستم اگر سوسك يا حشره از ميدان ديد هواپيما خارج شود يك سنسور به آنها هشدار مي دهد كه جسمي در ميان راه قرار دارد و باعث مي شود ربات بازگردد.
Edgar Lobaton يكي از افراد گروهي كه بر روي اين پروژه كار مي كنند ميگويد:” در اين ايده يك گروه از biobot هاي داراي سنسور مانند سوسك هاي قابل كنترل در محيط مورد نظر مانند محيط هاي خطرناك و ناشناخته رها مي شوند.” او همچنين افزود:”تكنولوژي كنترل از راه دور براي مكان هايي كه حركت در آنها سخت است استفاده مي شود در اين پروژه ما از حركت سوسك ها مي توانيم آن منطقه را شناسايي كنيم، همچنين اين منطقه مي تواند به طور حدودي توسط هواپيما نيز شناسايي شود. وقتي كه سوسك ها محيط را شناسايي كردند، يك الگوريتم ديتاي داخل سنسورها را پردازش مي كند و اين اطلاعات را به ناظران مي دهد. زماني كه اطلاعات كافي براي تجسم نقشه ي يك مكان بدست آورده شود، هواپيما به آرامي شروع به پرواز در منطقه ي ناشناخته مي كند و شروع به تعقيب كردن سوسك از ابتداي مسير مي كند و نقشه اي ديگري را از محل بدست مي آورد، يك نرم افزار دو نقشه را با هم منطبق و تركيب مي كند و اين كار تا پردازش كامل منطقه مورد نظر ادامه پيدا مي كند. با ايجاد اين نقشه تيم هاي ديگر مي توانند خطرات را شناسايي كنند يا از وجود بازماندگان حادثه اطلاع پيدا كنند.”
Lobton اضافه كرد:” ما پيش از اين نرم افزارهاي ديگري را طراحي كرده بوديم كه به واسطه ي آنها مي توانستيم نقشه ي مناطق كوچك را بوسيله ي biobot ها بدست بياوريم ، اما اين ايده امكان شناسايي مناطق بزرگتر را به ما مي دهد و منطبق كردن نقشه ها با يكديگر باعث ايجاد يك ديدگاه كامل تر و جامع تر مي شود. همچنين اين پروژه براي نجات بازماندگان بعد از فجايع كاربردي تر خواهد بود و توانايي پيدا كردن يك راه امن براي نجات بازماندگان را دارد و يا قابليت شناسايي راه هاي امن براي ورود گروه هاي ديگر به محيط را داراست.”
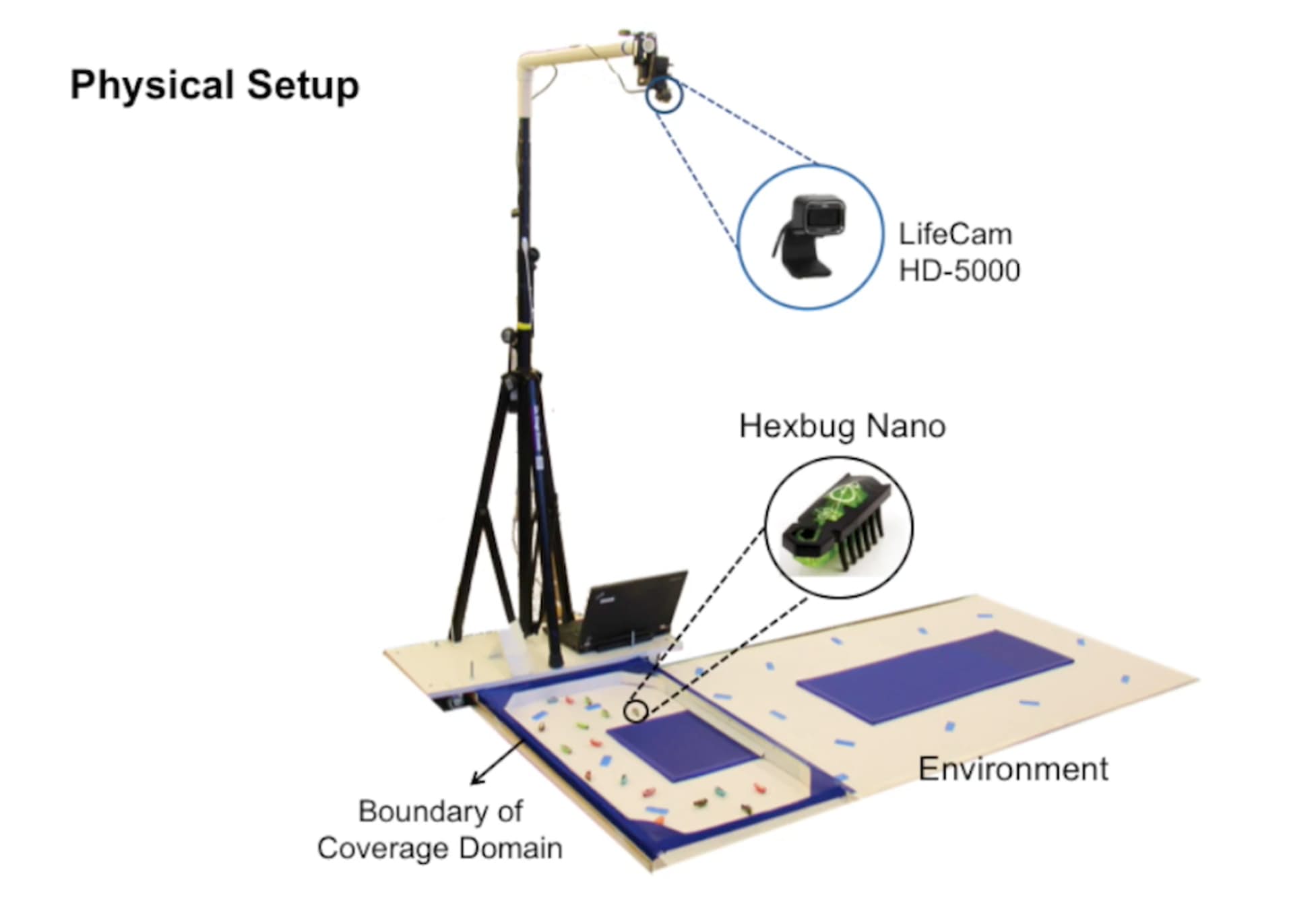
براي آزمايش اين سيستم محققان گروهي از Hexbug ها را با اندازه ي ١/٥ اينچ (٣/٨ سانتي متر) كه رفتار سوسك ها را تفليد مي كنند را در يك مسير پر پيچ و خم در آزمايشگاه قرار داند، يك دوربين در بالاي هواپيما نيز نصب كردند و يك جسم متحرك را به مسير اضافه كردند كه ايجاد مانع كند تا حركت هواپيما را در يك منطقه ي جديد را شبيه سازي كند. از آنجا كه فضاي حركت ربات محدود است نرم افزار مي تواند بر اساس مناطقي كه ربات حركت كرده يا حركت نكرده است منطقه ي مورد نظر را شناسايي كنند، در حالي كه اين تست با ربات هاي كه شبيه حشرات بودند انجام شد تيم اين پروژه اعلام كرده است كه اقدام بعدي اين است كه بررسي كنند biobot ها چگونه اين كار را انجام مي دهند.
دو مقاله بر اساس اين تحقيق منتشر شده است، يكي در مجله ي Robotic And Autonomous و ديگري در IEEE Transaction On Signal And Information Processing Over Networks.
